Wissenschaftlicher Mitarbeiter

M.Sc. M.Sc. Tingli Hu
Technische Universität München
Lehrstuhl für Robotik und Systemintelligenz (Prof. Haddadin)
Postadresse
Georg-Brauchle-Ring 60_62
80992 München
Dienstort
Lehrstuhl für Robotik und Systemintelligenz (Prof. Haddadin)
Georg-Brauchle-Ring 60_62(2941)/I
80992 München
- Tel.: +49 (89) 289 - 29407
- Sprechstunde: Vereinbarung per Email
- tingli.hu@tum.de
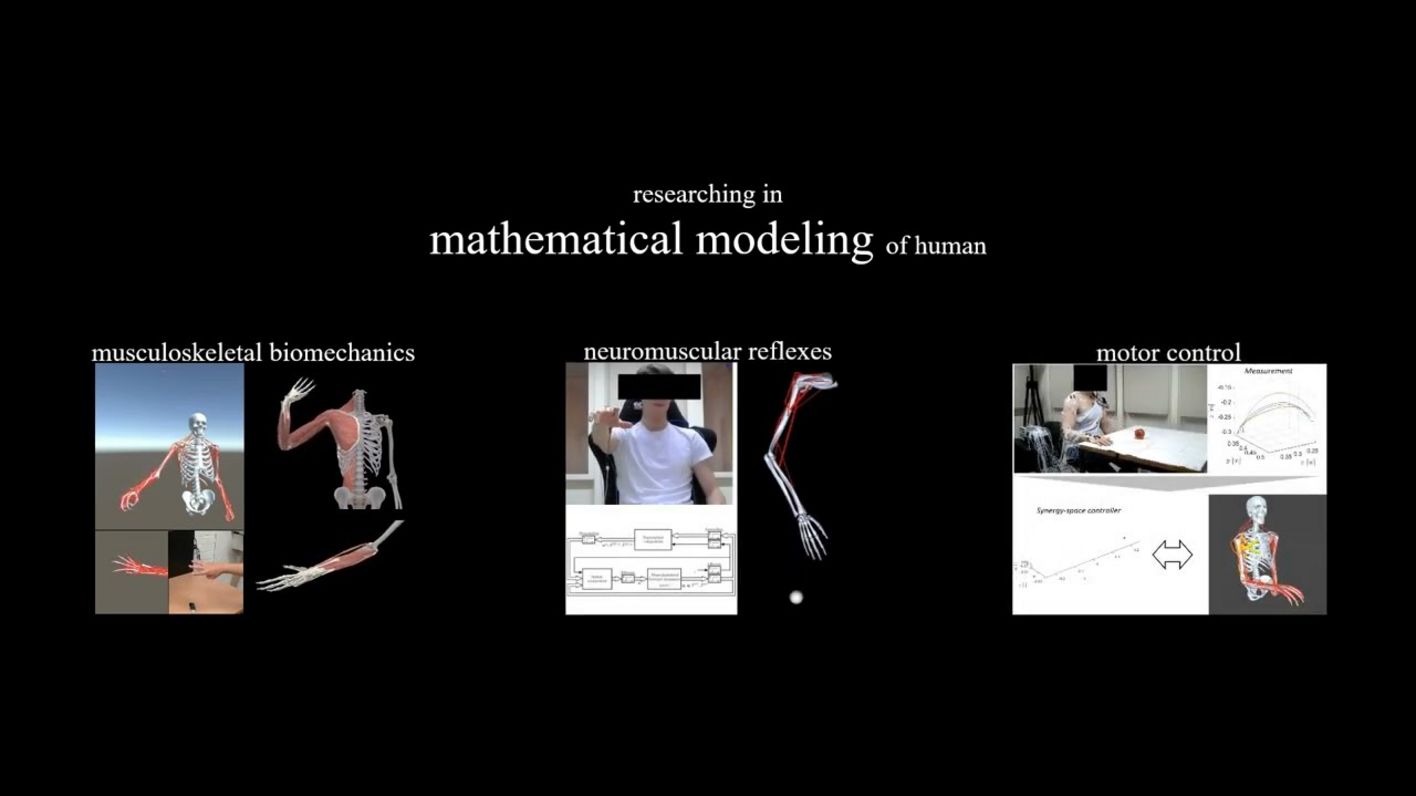
I am scientist with an interdisciplinary background spanning electrical engineering, biomedical engineering, information technology, and theoretical mechanics. I have been advancing my research career in human neuromechanics and motor control with Prof. Sami Haddadin since 2014, and have been leading a small team in the same research area since 2023. I am also (co-)leading the human motor control lab since 2016.
My research focus is human neuromechanics and motor control (Hu & Co), including
- human shouler-arm-hand musculoskeletal biomechanics,
- human neuromuscular control,
- human spinal neural-circuit model.
I am also interested in
- multisensor data fusion of biomedical signals,
- parameter identification and model calibration,
- physics-based computer graphics, and
- intelligent prosthesis (control & autonomy).
Mehr Informationen
Research in human neuromechanics and motor control (Hu & Co)
Human musculoskeletal biomechanics model
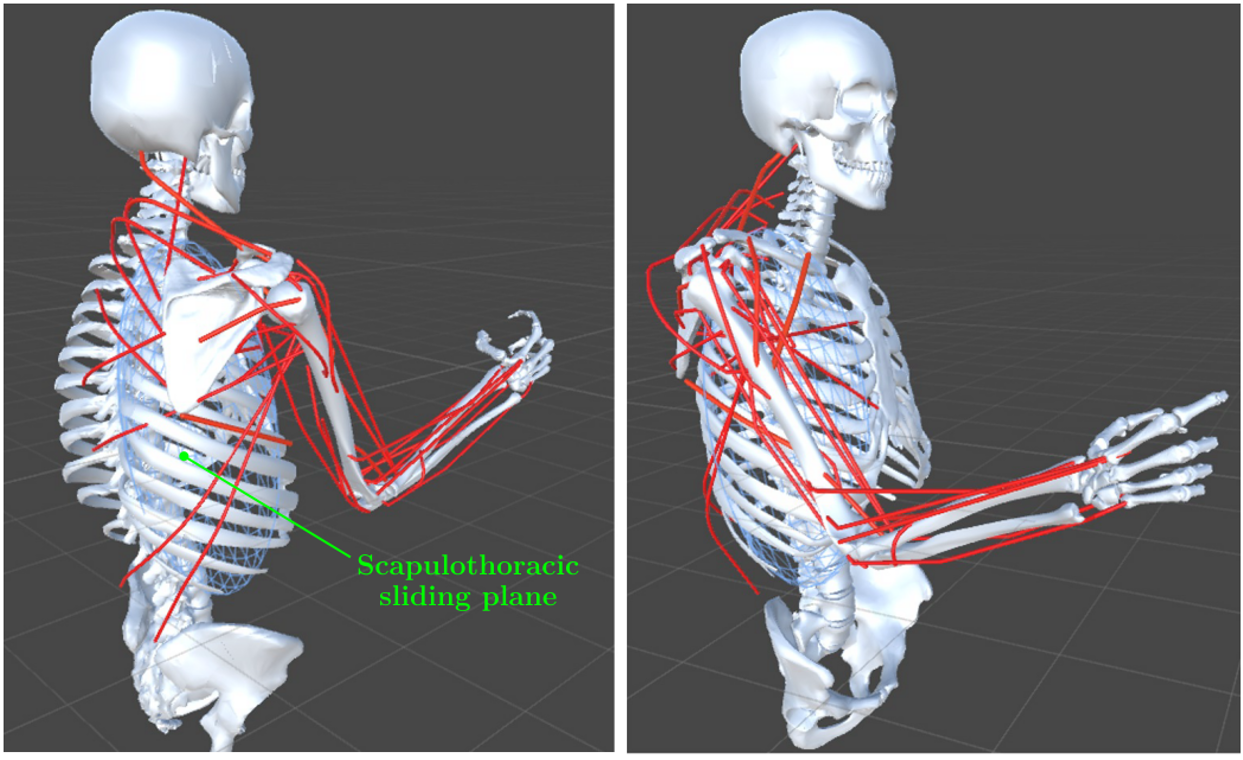
Hightlights:
- lumped-parameter dynamical model,
- 12 joint degrees of freedom,
- 42 (Hill-type) musculotendon actuators,
- anatomically and biomechanically consistent scapulothoracic sliding plane,
- validated with experimental data.
More details in
[1] T. Hu, J. Kühn and S. Haddadin, "Forward and inverse dynamics modeling of human shoulder-arm musculoskeletal system with scapulothoracic constraint," Comput. Methods Biomech. Biomed. Engin., 2020.
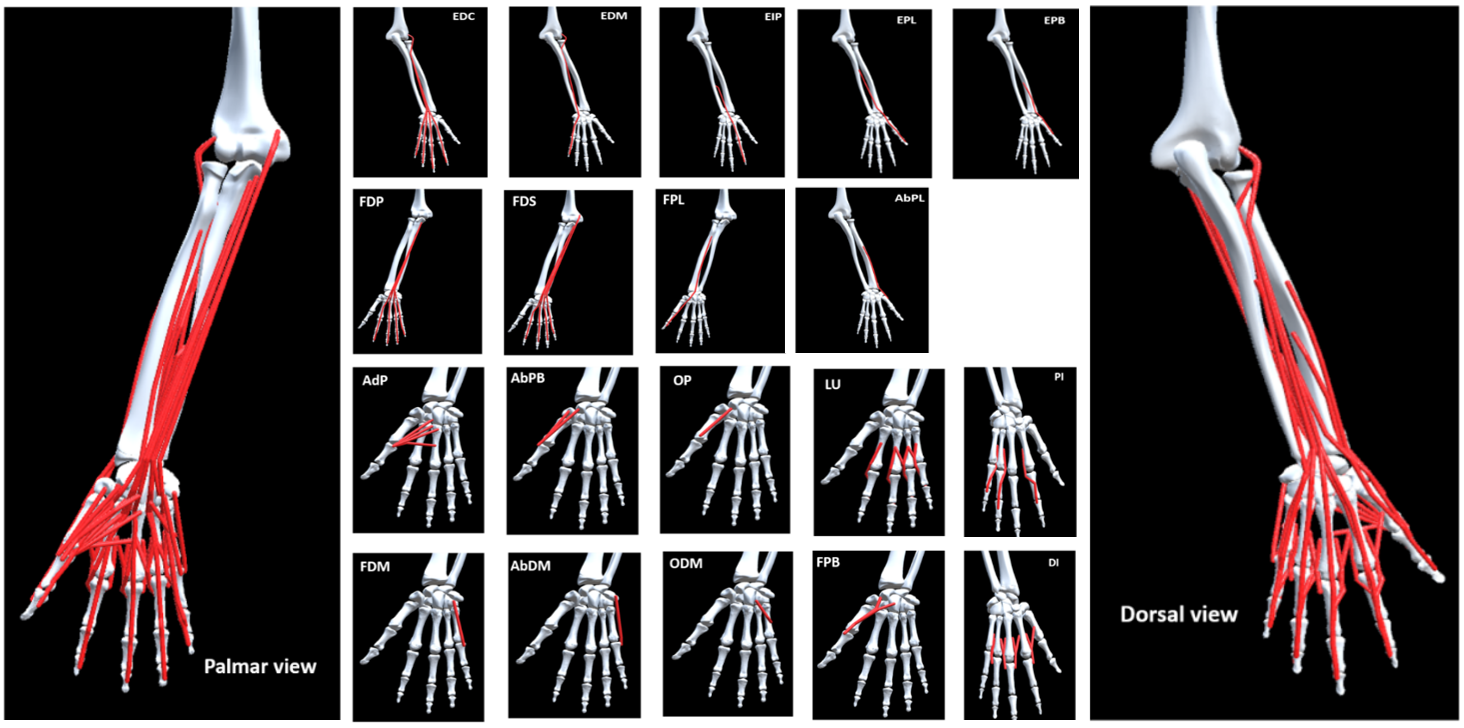
Hightlights:
- kinematics model,
- 26 joint degrees of freedom (with palm arc),
- 47 musculotendon routing paths (intrinsic and extrinsic),
- kinematic and anatomical high accuracy
More details in
- [2] J. Ma'touq, T. Hu and S. Haddadin, "Sub-millimetre accurate human hand kinematics: from surface to skeleton," Comput. Methods Biomech. Biomed. Engin., 2018.
- [3] J. Ma'touq, T. Hu and S. Haddadin, "A Validated Combined Musculotendon Path and Muscle-Joint Kinematics Model for the Human Hand," Comput. Methods Biomech. Biomed. Engin., 2019.
- work in progress
- distributed-parameter model
Human neuromuscular control
Highlights:
- reflex as a closed-loop control system
- focus on elbow flexors
- data collection and analysis with human subject and electrical stimulation
- musculoskeletal model from [1]
Main contributors: Tingli Hu, Johannes Kühn.
More details in
- [6] T. Hu. Analysis and modeling of human arm withdrawal reflexes using surface electromyography. Master’s thesis, Leibniz Universität Hannover, 2015.
- [7] T. Hu. A physiological arm model based On the analysis of human withdrawal reflex movements. Master’s thesis, Leibniz Universität Hannover, 2016.
Highlights:
- data collection and analysis of human motion
- one-dimensional synergy-space controller for three-dimensional motion
- musculoskeletal model from [1]
Main contributors: Tingli Hu, Johannes Kühn.
More details are coming soon...
Neural-circuit model
Other contributions
To health technology
Video: © Tingli Hu
Hightlights:
- real-time estimation of muscle activation
- high update frequency: up to 2000 Hz on an office computer
- computer graphically rendered in virtual reality
- musculoskeletal model from [1][2][3]
More details are coming soon...
- work in progress
- some highlights can be found here
Main contributors: Johannes Kühn, Tingli Hu.
More details are coming soon...
Relevant highlight: Human shoulder-arm musculoskeletal model from [1].
More details in
[7] J. Kühn, T. Hu, M. Schappler, and S. Haddadin, “Dynamics simulation for an upper-limb human-exoskeleton assistance system in a latent-space controlled tool manipulation task,” IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), 2018. https://doi.org/10.1109/SIMPAR.2018.8376286
Mehr Informationen
Musculoskeletal model from [1][2][3].
Relevant publication:
M Tröbinger, A Costinescu, H Xing, J Elsner, T Hu, A Naceri, L Figueredo, E Jensen, D Burschka, S Haddadin, "A Dual Doctor-Patient Twin Paradigm for Transparent Remote Examination, Diagnosis, and Rehabilitation," 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 2933-2940, doi: 10.1109/IROS51168.2021.9636626.
To scientific community
Hightlights:
- 30 activities of daily living
- 6 healthy right-handed subjects
- simultaneous and synchronized recording of
- trajectories of anatomical landmarks
- surface electromyograms
- scalp electroencephalograms
- in an electromagnetically isolated chamber
More details in
- [8] Hu T, Kuehn J, Haddadin S. 2018. Identification of human shoulder-arm kinematic and muscular synergies during daily-life manipulation tasks. In: IEEE Int. Conf. Bio. Rob.; Aug; Enschede, the Netherlands. p. 1011–1018.
- [9] G Averta, F Barontini, V Catrambone, S Haddadin, G Handjaras, J P O Held, T Hu, E Jakubowitz, C M Kanzler, J Kühn, O Lambercy, A Leo, A Obermeier, E Ricciardi, A Schwarz, G Valenza, A Bicchi, M Bianchi. U-Limb: A multi-modal, multi-center database on arm motion control in healthy and post-stroke conditions. GigaScience, Volume 10, Issue 6, June 2021.
Downloadable with file tag "TUM dataset" from
[10] G Averta, F Barontini, V Catrambone, S Haddadin, G Handjaras, J P O Held, T Hu, E Jakubowitz, C M Kanzler, J Kühn, O Lambercy, A Leo, A Obermeier, E Ricciardi, A Schwarz, G Valenza, A Bicchi, M Bianchi, 2020, "U-Limb", https://doi.org/10.7910/DVN/FU3QZ9, Harvard Dataverse, V4.