IROS 2023 CLiFF-LHMP: Using Spatial Dynamics Patterns for Long-Term Human Motion Prediction
MIRMI Aktuelles
IROS 2023: Die Bewegung von Menschen vorhersagen
KI.FABRIK, NEWS, Community, Robotik, Wahrnehmung, Künstliche Intelligenz |

Die Idee war gut: Spencer nimmt Passagiere am Eingang des Flughafens Schiphol in Amsterdam in Empfang, schaut sich die Boarding-Tickets an und bringt sie zum Gate. Was in einer menschenleeren Halle vielleicht recht einfach möglich wäre, ist zwischen vielen Menschen eine Herausforderung. Denn Spencer soll möglichst schnell das Gate erreichen und dabei die Bewegung der Menschen so wenig wie möglich stören. Den in dieser Hinsicht besten Weg zum Ziel zu finden, war nicht einfach. Denn basierend auf der Pfadplanung, die 2016 Stand der Forschung war, entschied sich der mobile Roboter häufig für einen der vorherrschenden Bewegungsrichtung der Menschen entgegen gerichteten Weg. Dies lag daran, dass Roboter damals nur in ihrer direkten Umgebung wahrgenommene Bewegungen in ihre Pfadplanung miteinbeziehen konnten, nicht aber typische in einer Umgebung vorherrschende Bewegungsmuster. Anstatt den Passagieren ihren Weg zum Gate zeigen zu können, blieb der Roboter dann häufig in einem Pulk von Menschen stehen und behinderte deren Fortkommen.
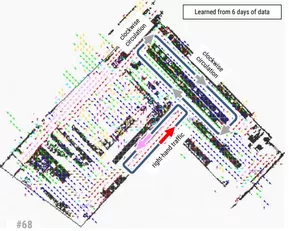
Aus Daten lernen: 92 Tage in einem Einkaufszentrum in Japan eingesetzt
Der Professor für die Perzeption von intelligenten Systemen der Technischen Universität München (TUM) Achim Lilienthal hat Spencer damals mit auf den Weg gebracht. Inspiriert von den Erfahrungen am Flughafen in Amsterdam, begründete er mit Kollegen und Kolleginnen den Forschungsbereich „Maps of Dynamics“. Damit sind Techniken gemeint, mit denen Roboter aus direkt beobachteter Bewegung Karten erstellen können, die die vorherrschenden Bewegungsmuster in einer Umgebung aufzeichnen können. Mit der Zusatzinformation in diesen Karten (etwa, dass Menschen an einem bestimmten Punkt mit hoher Wahrscheinlichkeit langsam nach links abbiegen oder schnell geradeaus weitergehen) können Roboter heutzutage bessere Wege durch Menschenmassen hindurch finden.
Genauere Prognosen: Nur noch Abweichungen von fünf Metern nach 50 Sekunden
Während es zunächst darum ging, Robotern eine bessere Planungsfähigkeit zu geben, beschäftigt sich die bei der diesjährigen IROS vorgestellte Arbeit damit, mit Hilfe der „Maps of Dynamics“ genauer vorhersagen zu können wie sich einzelne Menschen, die sich kurz in der Nähe des Roboters aufhalten in nächster Zeit bewegen werden. Für diese Untersuchungen benutzten der MIRMI-Professor und sein Team 92 Tage räumlicher Bewegungsdaten, die in einem Einkaufszentrum in Japan aufgenommen wurden. Die historischen Bewegungsdaten der Konsumenten zeigen an, in welchen Richtungen sie sich meistens bewegen. Durch diese Daten schaffen es die Forschenden deutlich zuverlässiger als bisher, vorherzusagen, wohin sich Menschen bewegen. Im Vergleich der Methoden berechnen die Forschenden der Technischen Universität München (TUM) unter Lilienthals Regie nach 50 Sekunden eine durchschnittliche Abweichung des angegebenen Ziels von nur fünf Metern, gegenüber acht bis 12 Metern bei den Ansätzen, die bislang den Stand der Forschung repräsentieren. Ein Durchbruch bei der Vorhersage über so lange Zeiten.
Das Ziel: Autonome mobile Roboter sollen sozialverträglich sein
Wären die Erkenntnisse schon bei Spencer zum Einsatz gekommen, wäre der Roboter am Flughafen in Amsterdam nicht mehr gegen den Strom gefahren und hätte die Bewegungen einzelner Menschen über längere Zeiträume besser vorhersagen können. Für autonome mobile Roboter sind diese Methoden wichtig für deren Sicherheit und Akzeptanz. Denn wenn sich ein Mensch oder ein Fahrzeug nähert, bleibt dem Roboter oft nur die Möglichkeit stehen zu bleiben oder die Sicherheit der Umgebung zu gefährden. Mit dem durch Maps of Dynamics zugänglichem Wissen, wie sich Menschen auch außerhalb des direkt „einsehbaren“ Bereichs bewegen, kann die Kollisionsgefahr minimiert und das Risiko in Stau- oder Gegen-den-Strom-Situationen zu geraten verringert werden. Auf diese Weise können autonome mobile Roboter sicherer und sozial verträglicher in mit Menschen geteilte Umgebungen integriert werden.
Accepted IROS-Publication: CLiFF-LHMP: Using Spatial Dynamics Patterns for Long-Term Human Motion Prediction; Yufei Zhu, Andrey Rudenko, Tomasz P. Kucner, Luigi Palmieri, Kai O. Arras, Achim J. Lilienthal, Martin Magnusson; IROS 2023