MIRMI Aktuelles
Tragbares Exoskelett: Prothesen imitieren das menschliche Muskelsystem und reduzieren Kontaktkräfte
Community, Forschung |
F1. Alex, du hast deine Promotion mit summa cum laude abgeschlossen. Im Rahmen deiner Doktorarbeit hast du dich auf die Entwicklung einer transhumeralen Prothese konzentriert. Was hat diese Prothese, was ähnliche nicht haben?
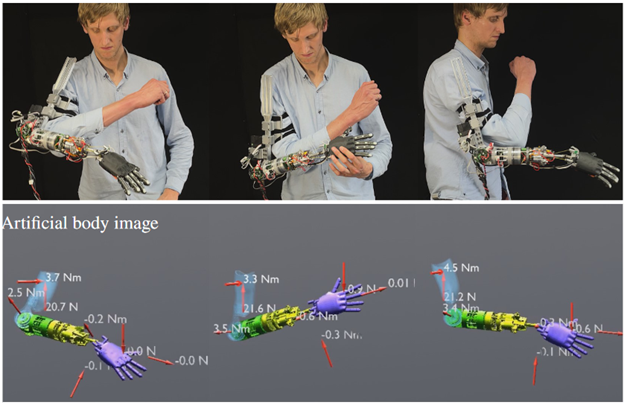
Unsere Prothese ist die erste ihrer Art, die innovative Funktionen wie Körperbewusstsein, Kontaktbewusstsein und eine menschenähnliche Reaktion auf Berührung für Prothesen, und im speziellen Oberarmprothesen, bereitstellt. Mit anderen Worten ist die Prothese sich ihrer Lage, Kinematik, Gelenkmomente und potenziellen Kontaktkräften in der realen Welt bewusst und ermöglicht die Realisierung beliebiger Steifigkeits- und Dämpfungseigenschaften. Dies ermöglicht es der Prothese, wie ein menschlicher Arm, ihre Position allein durch modellbasierte Kräfte und Momente zu halten, ohne die Notwendigkeit einer Positionsregelung. Als Konsequenz kann die Prothese durch geringe Interaktionskräfte geführt werden, Aufprallkräfte aufgrund ihrer nachgiebigen Eigenschaften mildern und propriozeptive Sensibilität bieten, was dem Gerät ein Tastgefühl verleiht. All diese Merkmale bilden eine Autonomie auf Drehmomentebene, womit Schlüsselmerkmale des menschlichen neuromuskulären Systems nachgeahmt werden. Schließlich werden all diese Funktionen in einer vier Freiheitsgrade umfassenden, menschenähnlichen Kinematik bei einem Gewicht von 1,8 kg ohne Hand realisiert, was etwa dem Gewicht eines vergleichbaren menschlichen Arms entspricht.
F2. Wie hast du ein solches Gerät entwickelt?
Wir haben die Prothese basierend auf drei neuen Paradigmen entworfen. Erstens haben wir für das Gesamtkonzept der Prothese den Stand der Technik in der menschlichen Motorsteuerung analysiert und eine technische Lösung abgeleitet, die das Design einer transhumeralen Prothese in Bezug auf den menschlichen Körper steuert. Als Konsequenz hat jeder Sensor, Aktuator, Regler und Recheneinheit eine direkte Entsprechung zu einem biologischen Organ im menschlichen Körper. Die Idee war, dass eine auf dieser Grundlage entwickelte Prothese auch menschenähnliches Verhalten zeigt. Zweitens haben wir für das mechatronische Design eine Physiksimulation der Prothese und ihrer Regler, einen digitalen Zwilling, entwickelt. Mit dem digitalen Zwilling konnten wir die richtige Balance finden, um neue Funktionen zu integrieren, die Anforderungen an Gewicht und Größe zu erfüllen und die Komplexität hochgradig nichtlinearer Systeme zu bewältigen. Drittens haben wir für die mechatronische Umsetzung auf die neueste Robotertechnologie gesetzt, mit dem Ziel, die technologischen Ansätze aus humanoiden und „Soft and Tactile Robotics" auf Prothesen zu übertragen.
F3. Du hast auch ein tragbares Exoskelett entwickelt, um eine transhumerale Prothese zu tragen. Was ist die Motivation hinter dieser Idee?
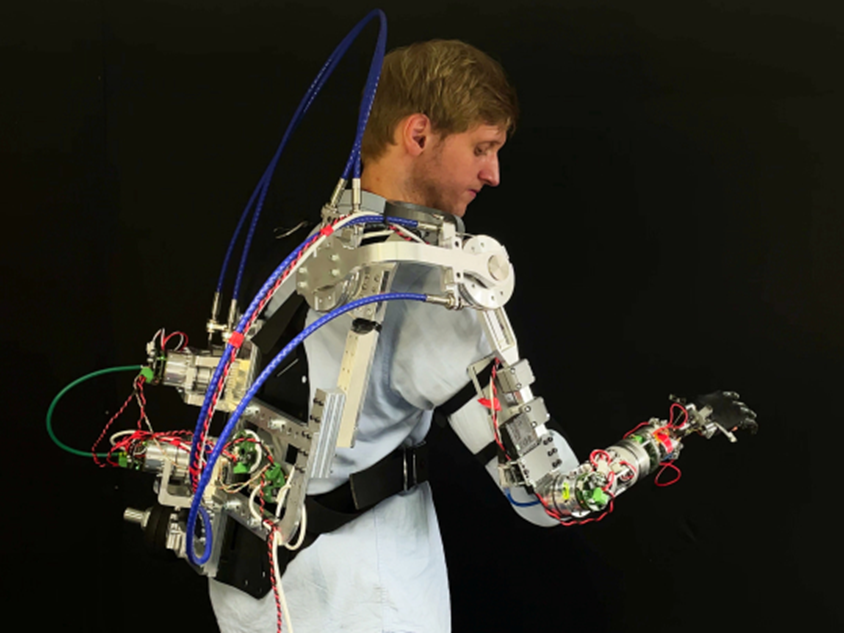
Bisher gibt es zwei Möglichkeiten, eine obere transhumerale Prothese am menschlichen Körper zu befestigen. Die erste verwendet ein Prothesenschaft, welcher den Stumpf des Prothesenträgers in eine Fassung einpasst, was jedoch zu hohen Interaktionskräften, Spannungen und möglicherweise sogar Schmerzen für den Prothesenpiloten führt. Die zweite Möglichkeit wird als Osseo Integration bezeichnet, bei der ein Metallinterface über einen chirurgischen Eingriff im Knochen des Patienten verankert wird, was mit typischen Problemen wie Infektionen einhergeht. Aus dieser Situation heraus haben wir am MIRMI-Institut eine dritte Option entwickelt, die Exoprothese. Die Exoprothese ist eine Kombination aus einem Exoskelett und einer Prothese, wobei die Prothese vom Exoskelett getragen wird. Das Exoskelett wird durch eine taktile Regelung, basierend auf der Technologie von „Soft- and Tactile Robotics“, realisiert sodass der Stumpf den Prothesenschaft über geringe Interaktionskräfte führen kann. Folglich werden die Interaktionskräfte drastisch minimiert, können aber gleichzeitig auch zur einfachen Führung des Schaftes genutzt werden.
F4. Was sind die nächsten Forschungsschritte bei der Künstlichen Neuromuskulären Prothese und der Exoprothese?
In unserer neuesten Forschung zur Exoprothese haben wir mechanische Designansätze, Steuerungskonzepte analysiert, die Interaktionsmomente am menschlichen Körper untersucht und den ersten tragbaren Prototypen ExoPro Gen I in menschlichen Benutzerexperimenten validiert. In diesem Zusammenhang wurde unser Prototyp nur für Labortests entwickelt, um grundlegende Forschungsfragen zur Exoprothese zu beantworten. Für die Zukunft müssen Gewicht und Größe des Geräts minimiert werden, um ein praktisches und elegantes Design für den Einsatz in der Außenwelt zu finden. In zukünftigen Arbeiten sollen diese beiden Konzepte in klinischen Studien getestet werden, ein notwendiger Schritt, bevor diese Technologie für Prothesennutzer verfügbar gemacht wird.
Weitere Informationen:
A. Tödtheide, E. Pozo Fortunić, J. Kühn, E. Jensen, and S. Haddadin, “A Transhumeral Prosthesis with an Artificial Neuromuscular System: Sim2Real-Guided Design, Modeling and Control”, in International Journal of Robotics Research (IJRR), 2023, (accepted), doi: 10.1177/02783649231218719.