Das Interdisziplinäre Forschungslabor IFL: Medizin und Technik zusammen erforschen
NEWS,
Innovation,
Gesundheit,
Forschung
|
Neue Lösungen an der Schnittstelle von Medizintechnik und Computer- sowie Roboter-unterstützten Prozessen in der Medizin: Das ist das Ziel des Interdisziplinären Forschungslabors IFL, das Prof. Nassir Navab im Klinikum rechts der Isar vor sieben Jahren aufgebaut hat. Aktuell laufen über zehn Forschungsprojekte parallel. Die Robotik und künstliche Intelligenz spielen eine wichtige Rolle.
Die Nähe zum Klinikum rechts der Isar ist bewusst gewählt: Denn die Hightech-Projekte von Prof. Nassir Navab im IFL sind kollaborativ angelegt und erfordern die Mithilfe von medizinischen Personal. Der Transfer von technischen Entwicklungen in die klinische Routine erfolgt Schritt für Schritt. Das ständige Feedback vom End-User, dem medizinischen Personal in Kliniken, ist hier ein wichtiger Bestandteil.
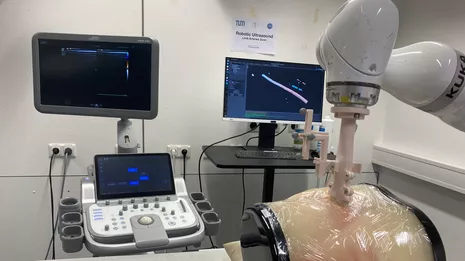
Ein gutes Beispiel für interdisziplinäre Forschung zwischen Informatik und dem Klinikum rechts der Isar ist der robotischer Ultraschall: Prof. Nassir Navab, Leiter des Lehrstuhls für Informatikanwendungen in der Medizin und Augmented Reality an der Technischen Universität München (TUM) arbeitet daran, Ultraschalluntersuchungen künftig selbständig ablaufen zu lassen, ohne Beisein von Medizinerinnen oder Medizinern. Das kann die Arbeitsbelastung für Ärztinnen und Ärzte reduzieren und Zeit sparen. In der Praxis sind etwa Gefäßverengungen im Bauchraum oder von Arterien im Unterarm bereits in 3D-Bildern darstellbar. Sehen Sie auch
Robotik-Projekte: Von Bildergebung für Ultraschall bis zu Loop-X
Die „Roboter-gestützte Ultraschall-Bildgebung“ ist neben der automatischen Erstellung von Befundberichten auf Basis von Röntgenbildern oder dem Einsatz des mobilen Bildgebungsroboters „Loop-X“ (von der Firma Brainlab) als Plattform für flexible Computertomographie (CT) ein wichtiger Forschungsbereich im IFL, in dem etwa 30 Forschende tätig sind.
Für robotische Projekte ist der Wissenschaftler Dr. Zhonglian Jiang verantwortlich. Folgende Projekte stehen hier besonders im Fokus:
Im Projekt „Robotic Ultrasound for Spinal Injections“ geht es darum, ein robotisches System zu entwickeln, das Ärztinnen und Ärzte darin unterstützt, Spritzen an der Wirbelsäule sicher zu setzen. Dafür findet das System selbständig die Region, in der die Spritze gesetzt werden soll und zeigt Ultraschallbilder von der jeweiligen Region.
Im Projekt „Intelligent Robotic Sonographer for Autonomous Scanning“ entwickeln die Forschenden einen Weg, mithilfe von Ultraschall in Echtzeit und autonom Gefäßerkrankungen diagnostizieren zu können. Dafür ist es unter anderem wichtig, den Ultraschallkopf mit der richtigen Kraft auf der Haut aufzusetzen und die Arterien präzise zu finden. Ein wichtiger Vorteil der Methode liegt in der Reproduzierbarkeit der Daten.
Im Projekt „Optimal path planning for autonomous robotic ultrasound scanning (reinforcement learning)“ geht es darum, dass der Ultraschallkopf den bestmöglichen Weg findet, um Strukturen zu visualisieren. So können etwa Rotations- als auch Translationsbewegungen nötig sein, um einen von den Rippen verursachten Schatten zu eliminieren oder die Gesamtbildqualität zu verbessern, indem die Sonde nahe an den jeweiligen Anatomien platziert wird.
Etwa 30 Forschende sind im Interdisziplinären Forschungslabor IFL von Prof. Nassir Navab beschäftigt.
Um mehr über die aktuellen Entwicklungen im Labor von Prof. Navab zu erfahren, sehen Sie sich diese Videos an, die die aktuellen Roboter des Labors und deren mögliche Anwendungen in der klinischen Praxis zeigen. 🌟