MIRMI Aktuelles
Exosuits für mehr Selbstständigkeit – die Zukunft der tragbaren Robotik
NEWS, Gesundheit, Robotik | erstellt von Sarra Chaouch-Şimşek
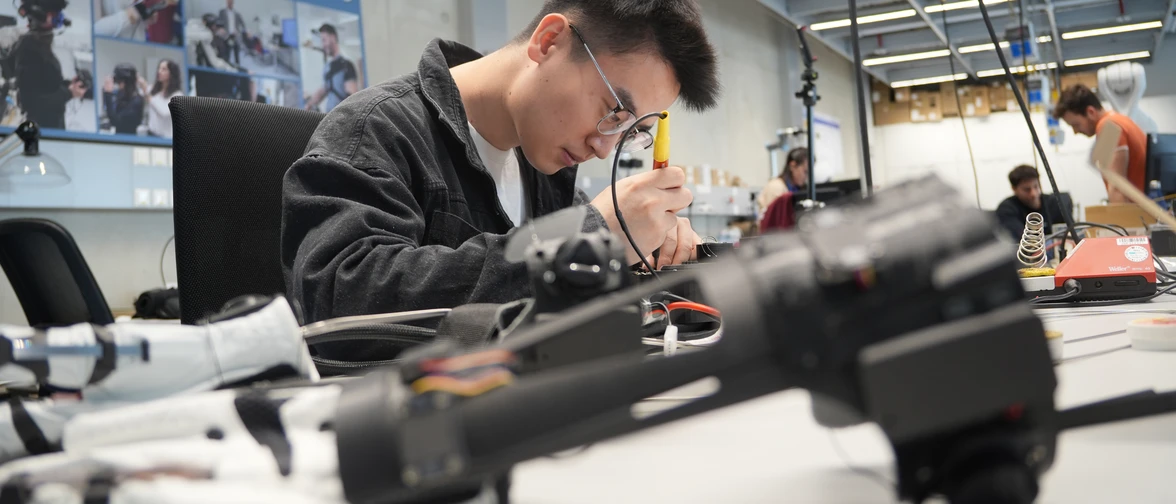
Die Tür zum Labor im Erdgeschoss des Siemens Technology Centers fällt ins Schloss, ein kurzer Gang, dann links: An einem Tisch sitzt Huimin Su über Kabel und die Prototypen gebeugt. Neben ihm liegen weiße Handschuhe mit Kabelzügen, ein schwarzer Gürtel mit Motoren und Metallgehäuse. Die Szene wirkt wie Werkstatt und Zukunftsvision zugleich.
Huimin Su ist Doktorand in der Gruppe für Intelligente Bio-Robotik-Systeme unter der Leitung von Professor Lorenzo Masia. Hier arbeiten Forschende daran, wie tragbare Roboter – sogenannte Exosuits – Menschen mit Bewegungseinschränkungen helfen können. Den Anstoß gab für ihn ein Erlebnis während seines Masterstudiums, seine erste Begegnung mit einem Schlaganfallpatienten. “Und in diesem Moment habe ich gespürt: Es geht nicht nur um meinen Spaß am Bauen, sondern darum, etwas Sinnvolles für andere zu schaffen.”
Viele Exoskelette stützen die Beine, die Schulter oder den Ellbogen. Su richtet den Blick auf die feineren, aber entscheidenden Bewegungen: Hand, Handgelenk, Unterarm. Das Gerät, an dem er arbeitet, ist leicht, textilbasiert und wird über Kabel gesteuert. Das heißt: Statt Motoren direkt am Arm zu befestigen, nutzt er einen sehnengesteuerten Ansatz. Kabel ahmen menschliche Sehnen nach und übertragen Kräfte von externen Antrieben auf die Gelenke. Motoren am Gürtel ziehen an den Kabeln und übertragen die Bewegung auf Finger und Unterarm. So werden Greifen und Rotieren unterstützt – Bewegungen, die für Schlaganfallbetroffene oder ältere Menschen den Unterschied zwischen Abhängigkeit und Selbstständigkeit bedeuten können.
Das Konzept stammt aus der klassischen Spiegeltherapie, wie sie in der Physiotherapie und Ergotherapie bei Schlaganfallbetroffenen eingesetzt wird. Dort sehen Patientinnen und Patienten im Spiegel die gesunde Hand und täuschen dem Gehirn vor, die betroffene Seite zu bewegen. Sus Gerät geht weiter: Bewegungen der gesunden Hand werden gemessen und in Echtzeit auf die beeinträchtigte Seite übertragen. So entsteht nicht nur visuelles Feedback, sondern tatsächliche Bewegung. „Es geht nicht nur um das Bild im Spiegel – entscheidend ist, dass auch die betroffene Hand tatsächlich bewegt wird. Das macht die Therapie wirksamer.“ Mit dieser Technologie könnten Betroffene künftig zu Hause trainieren, statt auf tägliche Klinikbesuche angewiesen zu sein.
Vom Labor in den Alltag
„Man hat ein vollständiges Design im Kopf, aber beim ersten Prototypen treten immer Probleme auf. Man muss verbessern, robuster und komfortabler werden. Es gibt keine Standardlösung“, erklärt Su. Immer wieder muss nachjustiert werden. Nach mehreren Entwicklungsrunden steht nun der nächste Schritt bevor: die Synchronisation des Systems und erste klinische Tests mit Betroffenen.
Noch kommt der Exosuit in der robotischen Spiegeltherapie für die Rehabilitation zum Einsatz. In diesem Stadium arbeitet er mit Standardsensoren. Doch Su denkt weiter: Künstliche Intelligenz soll Bewegungsintentionen erkennen – etwa über elektrische Muskelströme (EMG) oder minimale Restbewegungen. Schon eine minimale Fingerbewegung könnte reichen, um den nächsten Schritt einzuleiten. „Vielleicht hat er den Finger nur ganz leicht bewegt, und der Roboter weiß: Okay, er möchte greifen – und dann unterstützt das System“, erklärt Forscher Su. Damit ließe sich die Technologie vom Reha-Alltag in den normalen Alltag übertragen.
Die Faszination begann früh: Su baute schon als Student kleine humanoide Roboter für Wettbewerbe. Die Begeisterung für Technik ist geblieben. Doch sie hat sich gewandelt. Heute ist es nicht mehr nur der Reiz am Basteln, sondern die Möglichkeit, Leben zu verbessern: „Vielleicht wird nicht jeder dieses Gerät nutzen können. Aber wenn es manchen Menschen hilft, wieder selbstständig zu sein, dann lohnt es sich.“
Diese Forschung zeigt, warum tragbare Robotik im MIRMI-Kosmos eine Schlüsselrolle spielt: Sie verbindet Robotik und Rehabilitation mit einem klaren Ziel: Selbstständigkeit und Lebensqualität zu stärken. Su: „Anstatt Hilfe von anderen zu bekommen, wollen Menschen ihre Fähigkeiten im Alltag selbst einsetzen. Niemand möchte gefüttert werden. Man möchte den Löffel selbst nehmen und das Essen eigenhändig zum Mund führen. Genau darin liegt die Aufgabe von Wearable Robots.“
Text: Sarra Chaouch-Şimşek
MIRMInute – Robotics & AI in One Minute | Episode 4: Exosuits for Independence in Action

Mehr Informationen