Können Roboter eine der hartnäckigsten Herausforderungen des Ozeans bewältigen – Unterwasserabfälle? Forscher der Technischen Universität München (TUM) glauben daran. Im Rahmen des EU-Projekts SEACLEAR 2.0 hat das Team einen autonomen Tauchroboter entwickelt, der Meeresmüll völlig selbstständig erkennen, klassifizieren und bergen kann.
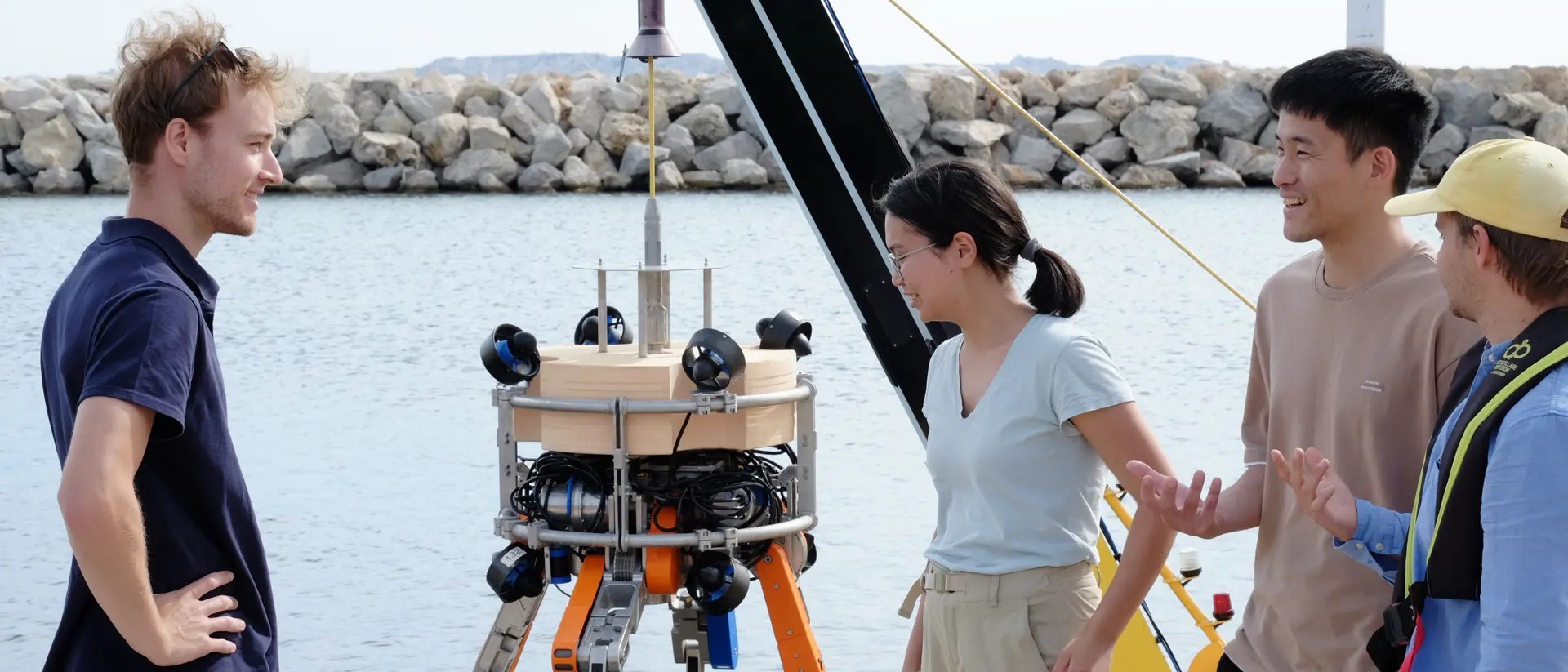
Nicolas Hoischen, Zara Zothabayeva, Tzu-Yuan Huang und Hamish Grant (von links nach rechts) von der TUM diskutieren im Hafen von Marseille über den neuen Tauchroboter der TUM.
Schon erste Demonstrationen zeigen eine Zukunft, in der Häfen und Docks sauber bleiben – ganz ohne Taucher – dank einer Unterwassermaschine, die schweres Müllgut präzise und schonend hebt. Im Hafen von Marseille bewies die autonome Unterwasser-Müllabfuhr erstmals, was sie kann.