Exosuits for Independence – The Future of Wearable Robotics
NEWS, Health, Robotics | created by Sarra Chaouch-Şimşek
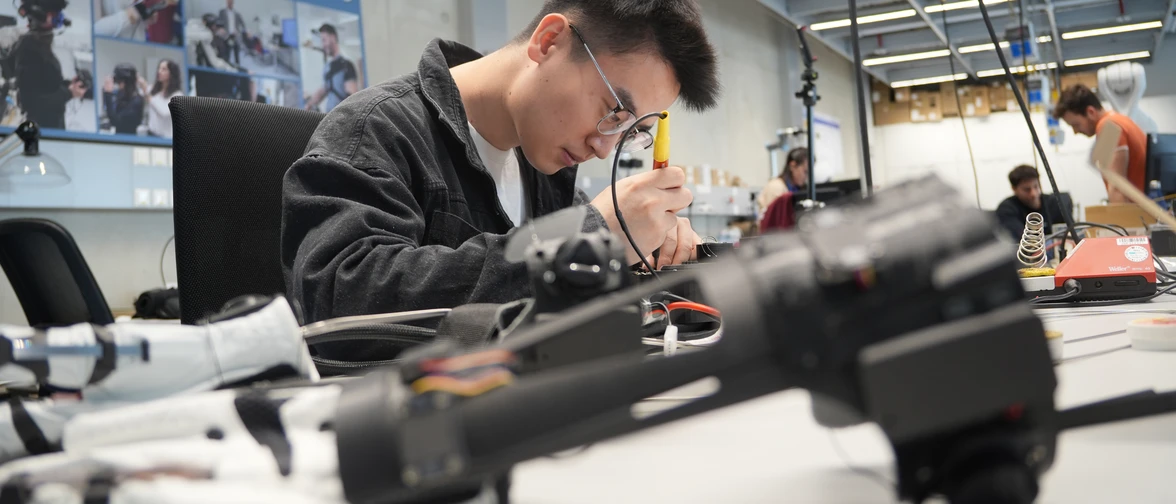
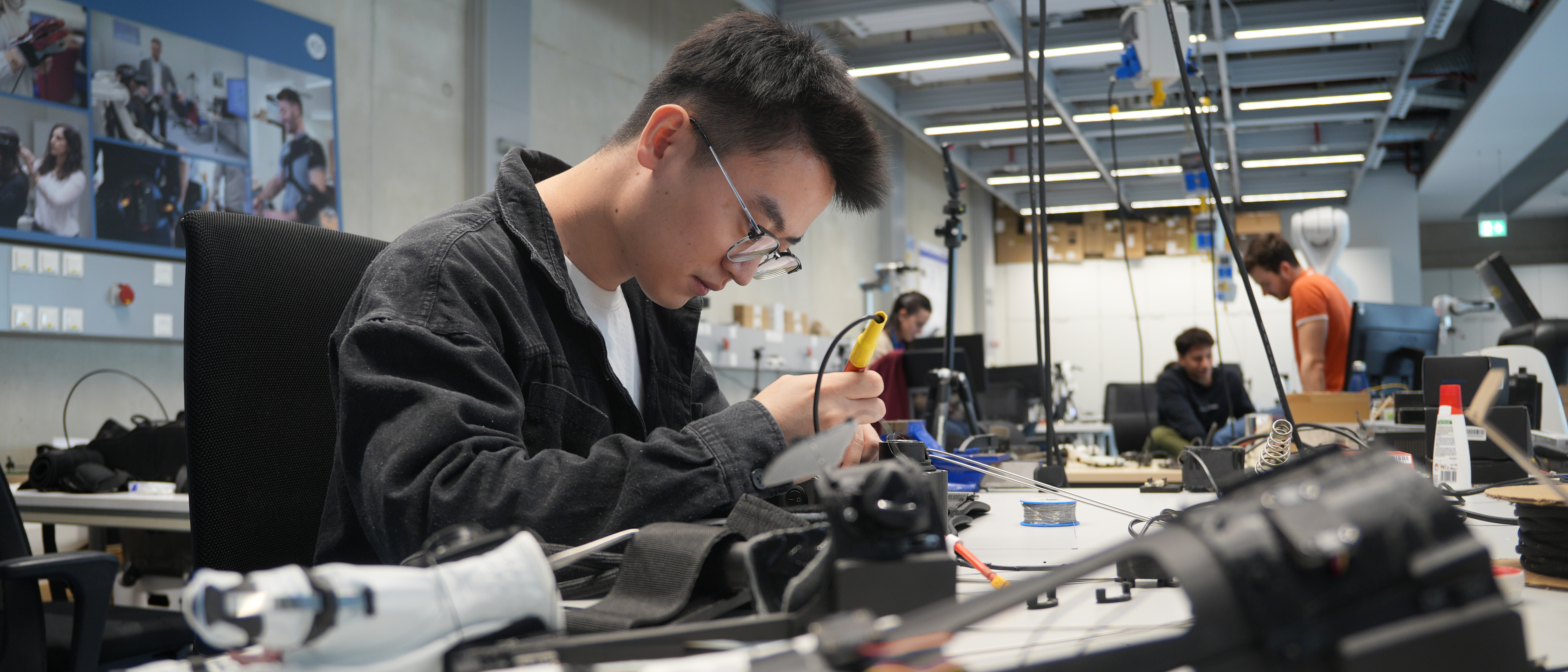
The door to the lab on the ground floor of the Siemens Technology Center closes, a short corridor, then left: at a table, Huimin Su leans over cables and prototypes. Next to him are white gloves with cable drives, a black belt with motors and metal housings. The scene looks like a workshop – and a glimpse into the future.
Huimin Su is a research associate in the Intelligent Bio-Robotic Systems Group led by Professor Lorenzo Masia. Here, scientists explore how wearable robots – so-called exosuits – can support people with movement impairments. The spark for Su came during his master’s studies, when he first encountered a stroke patient. “And in that moment, I felt it’s not just about my joy of building but about creating something meaningful for others.”
Many exoskeletons support the legs, the shoulder, or the elbow. Researcher Su focuses on smaller but crucial movements: the hand, the wrist, the forearm. The device he is developing is lightweight, textile-based, and tendon-driven. Rather than placing motors directly on the arm, he uses a tendon-driven approach. Cables mimic human tendons and transmit force from actuators located at the waist to the joints. Motors in the belt pull on the cables and transfer movement to the fingers and forearm. In this way, grasping and forearm rotation are supported – movements that can mean the difference between dependency and independence for stroke patients or elderly individuals.
The concept builds on classical mirror therapy, as used in physiotherapy and occupational therapy for stroke patients. In that approach, patients look into a mirror, see the healthy hand, and trick the brain into believing the affected side is moving as well. Su’s device goes further: movements of the healthy hand are measured and transmitted in real time to the impaired side. This creates not only visual feedback but actual motion. “It’s not only about the visual feedback – it’s also about the actual embodied movements being carried out, which makes the therapy more effective.” With this technology, patients could one day train at home, without depending on daily clinic visits.
From the Lab to Everyday Life
“Before you make an actual prototype, you already have in your mind everything designed in detail. But you will never know how it works until the first time you try the device by yourself. … You have to improve it, make it more robust, more comfortable. There is no standard solution,” Su explains. Adjustments are needed again and again. After many development rounds, the next step is in sight: synchronizing the system and beginning clinical trials with patients.
For now, the exosuit adopts the application of robotic mirror therapy for rehabilitation. At this stage it still works with standard sensors – but Su is already looking further: artificial intelligence should be able to recognize movement intentions – via electrical muscle signals (EMG) or minimal residual motion. Even the smallest movement could be enough to trigger the next step. “Maybe he just moved the finger very slightly, and the robot knows: okay, he wants to grasp – and then the system helps,” Su says. Such intelligence could move the technology beyond rehabilitation and into everyday life.
Su’s fascination began early: as a student, he built small humanoid robots for competitions. The passion for technology has remained – but it has changed its focus. Today it is no longer just about the thrill of building but about the possibility of improving lives: “Maybe not everybody will want to use this device. But if it helps some people regain independence, then it’s worth it.”
This research shows why wearable robotics play such a key role within the MIRMI ecosystem: it connects robotics and rehabilitation with a clear mission – strengthening independence and quality of life. Su: “You don’t want somebody to feed you. You want to actually grasp that spoon, dig in the food, and send it to your own mouth by yourself. That’s the job of wearable robots.”
Text: Sarra Chaouch-Şimşek