Community
Prostheses imitate human muscular system and reduce contact wrench via a wearable exoskeleton
Community, Research |
Q1. Alex, you accomplished your doctorate program with summa cum laude distinction. As part of your doctoral work, you focused on developing a transhumeral prosthesis, what does this prosthesis have that similar ones do not?
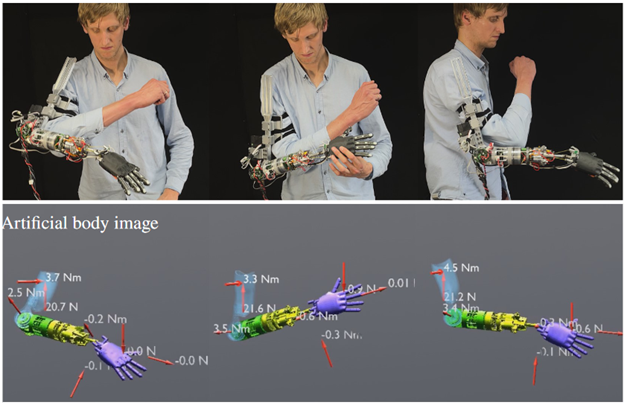
Our prosthesis is the first device which provides novel features such as body awareness, contact awareness and human-like contact response to upper-limb prosthetics. In other words, the prosthesis is aware of its orientation, kinematics, joint torques and potential contact forces in the real world and allows to render arbitrary stiffness and damping characteristics. This enables the prosthesis, like a human arm, to hold its position just by model-based forces and moments, without the need for position control. As the consequence, the prosthesis can be guided via small interaction forces, can mitigate impacts due to its compliant characteristics, and can provide proprioceptive sensing, giving the device a sense of touch. All these features form a torque-level device autonomy mimicking key characteristics of the human neuromuscular system. Finally, all these features are realized in a four degrees-of-freedom, human-like kinematics at a weight of 1.8 kg without hand which is about the weight of a comparable human arm.
Q2. How did you develop such a device?
We designed the prosthesis based on three new paradigms. First, for the overall prosthesis concept, we analyzed the state-of-the-art in human motor control, and derived a technical solution which governs the design of an upper-limb prosthesis in relation to the human body. As the consequence, each sensor, actuator, controller and computation unit has a direct correspondence to a biological organ in the human body. The idea was that a prosthesis, developed by this approach, also provides human-like behavior. Second, for mechatronic design, we developed a digital twin physics simulation of the prosthesis and its controllers. Using the digital twin, we could find the right balance to integrate new features, meet the requirements on weight and size and master the complexity of highly nonlinear robotic systems. Third, for the mechatronic realization, we build upon the latest robotics technology aiming to transfer insights from humanoid and soft- and tactile robots to prostheses.
Q3. You also created a wearable exoskeleton to carry a transhumeral prosthesis socket, what is the motivation behind this idea?
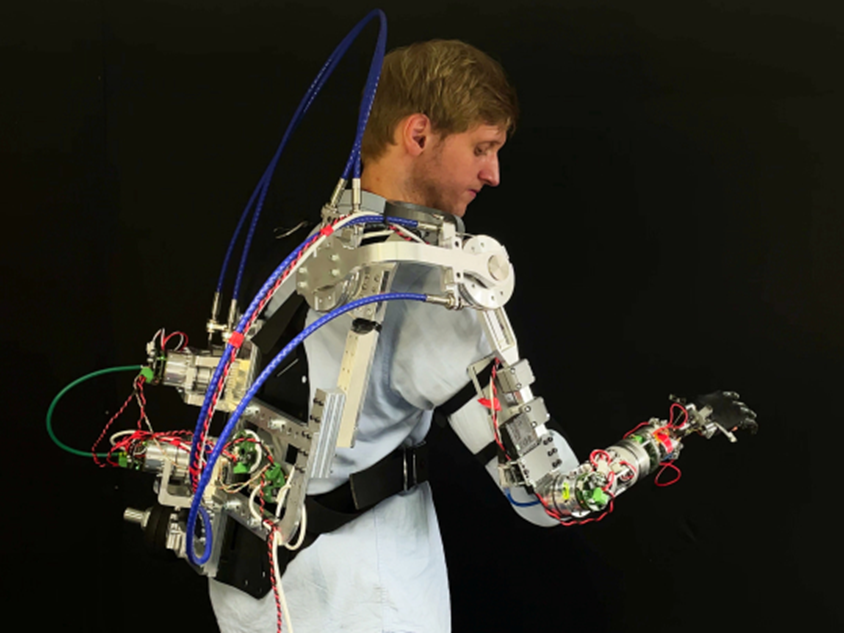
To date, there are two ways of attaching an upper-limb prosthesis to the human body. The first one uses a socket, where the residual limb is fitted into a mechanical interface, which, however, leads to high interaction forces, stress and potentially painful for the prosthesis pilot. The second one is called osseointegration, which anchors a metal interface into the bone of the patient via a surgical intervention, coming along with typical problems such as infections. As the consequence, we at MIRMI, developed a third option, the exoprosthesis. The exoprosthesis is combination of an exoskeleton and a prosthesis, whereas the prosthesis is carried by the exoskeleton device. The exoskeleton is realized by tactile control, the technologies from soft- and tactile robotics, such that the residual limb of the pilot can guide the prosthesis socket via small interaction forces. Consequently, the interaction forces are drastically minimized but can also be used for seamless guidance of the socket at the same time.
Q4. What are the next research steps in Artificial Neuromuscular Prosthesis and exoprosthesis?
In our latest research about the exoprosthesis, we proposed mechanical design approaches, control concepts, analyzed the interaction wrenches on the human body and validated the first wearable prototype ExoPro Gen I in human user experiments. In this context, our prototype was only developed for laboratory tests to answer the fundamental research questions about the exoprosthesis. For the future, the weight and size of the device must be minimized to find a practical and elegant design for use in the outside world. In future works, these two concepts shall be tested in clinical research - a necessary step, before making this technology available for prosthesis users.
More information:
A. Tödtheide, E. Pozo Fortunić, J. Kühn, E. Jensen, and S. Haddadin, “A Transhumeral Prosthesis with an Artificial Neuromuscular System: Sim2Real-Guided Design, Modeling and Control”, in International Journal of Robotics Research (IJRR), 2023, (accepted), doi: 10.1177/02783649231218719.