
Kim, you joined TU Munich five years ago and MIRMI just under three years ago. What do you deal with?
I work with an exoskeleton in the very early mobilization of intensive care patients. Here, it is important to provide each patient with individualized treatment. One of the main goals is to get the patient back on his own legs as early as possible. One question I ask myself is how well the patient can still move his legs independently after his illness – how active the muscles are. An exoskeleton should then offer him just as much support as necessary to enable him to live as independently as possible. I am working on improving an algorithm that "tells" the exoskeleton how much support the robot needs to provide and makes sure that the patient is not overloaded. To do this, we are currently measuring muscle activity using electromyograms (EMG) of the patient. An important part of my doctoral work will be to derive an individual therapy based solely on the sensor information from the exoskeleton called "Vemotion". For this purpose, I want to develop a model that improves therapy in the intensive care unit for patients as well as hospital staff.
How did you come to MIRMI?
That was more by chance. A friend drew my attention to the fact that the Geriatronics Center is opening in Garmisch, which combines rehabilitation and technology, especially for the elderly. Since I had done my master's degree in Healthcare and Rehabilitation Technology and my master's thesis on prosthetics at the prosthetics specialist Otto Bock, it was a very good fit. This connection between movement and technology has always appealed to me. That is why I studied sports and technology in my bachelor's degree, where the ultimate goal was to develop equipment of all kinds for sports, whether shoes, fitness equipment, or whatever. Alongside my studies, I assisted an orthopedic shoemaker, for example, in producing sensorimotor insoles for customers. The aim here was to measure the forces and pressures in the foot, even during walking, and then to develop a customized insole. At the end of the day, that's all I do today: I use measured values, but now with the help of algorithms, to support customers (or patients) as individually as possible.
What particularly excites you about working at MIRMI?
I think it is great that our research benefits people and that I already have close contact with patients and treat physiotherapists and doctors during my research tasks. An algorithm of the "Vemotion" system, for example, was developed by us at MIRMI (in collaboration with Reactive Robotics) and the system – freshly certified – has already been in use in four clinics since the beginning of the year. When we develop new algorithms, we need to do feasibility and clinical studies to verify the therapeutic benefit. I am currently working together with three patients for a feasibility study, for which I am using new algorithms. For this study, I am usually in the clinic about one or two days a week, but sometimes even more often. Especially this interdisciplinary exchange is very exciting for me!
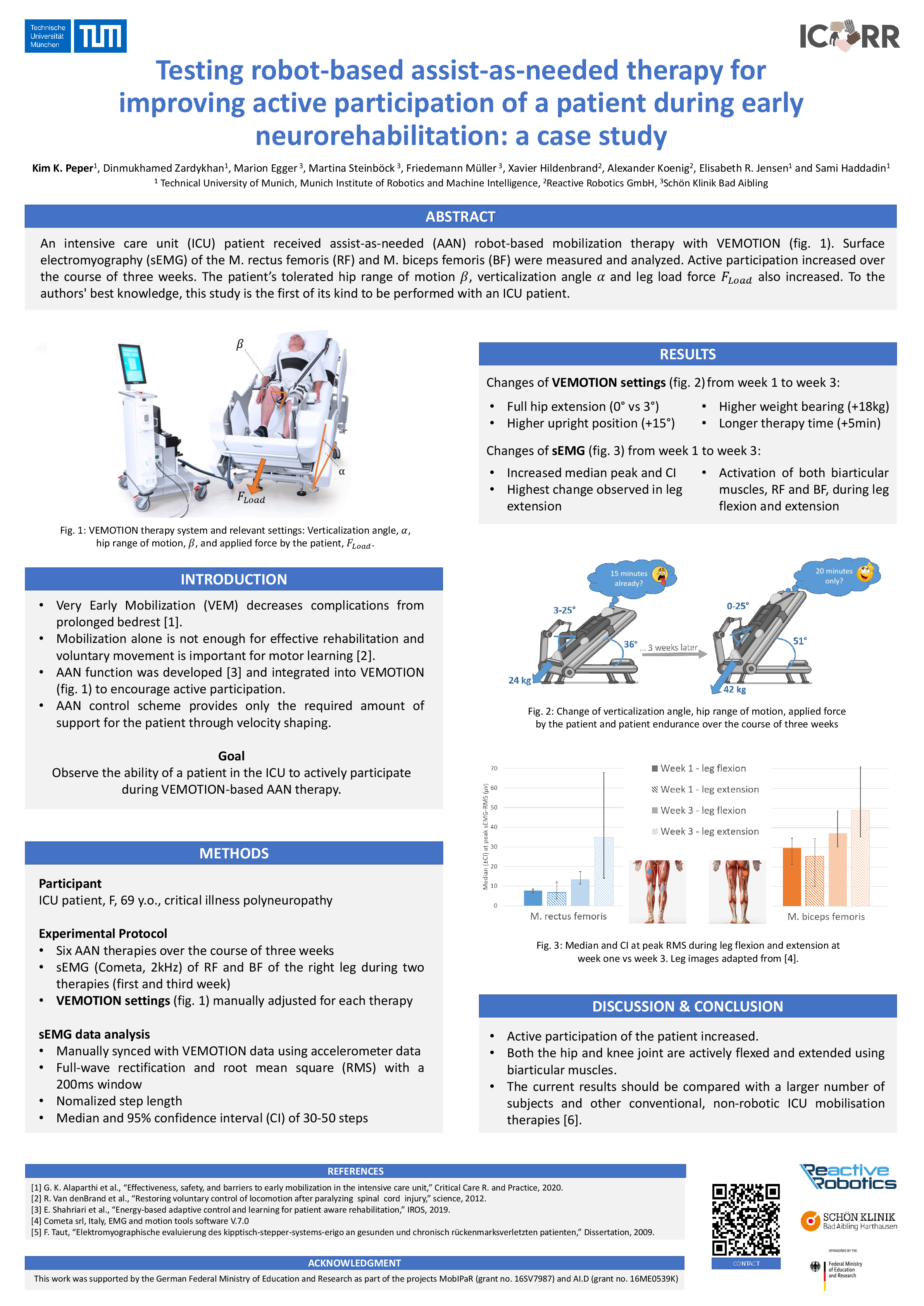
At the ICORR Congress in Rotterdam, Kim Kristin Peper just presented recent findings from her research. Click here to read the poster: